2018-Cohesive Subgraph Computation over Large Sparse Graphs
本文是对该书的内容进行简单整理,全文过长,详细内容在PPT内,其中对各个章节的核心内容和算法将在下方进行简单说明分类。
第一章:
基础知识介绍:包括图的基本术语,相应数据集;以及相应的图算法的综述
第二章:
数据结构的介绍,皆为用来存储对应图结构的:
Linked List-Based Linear Heap
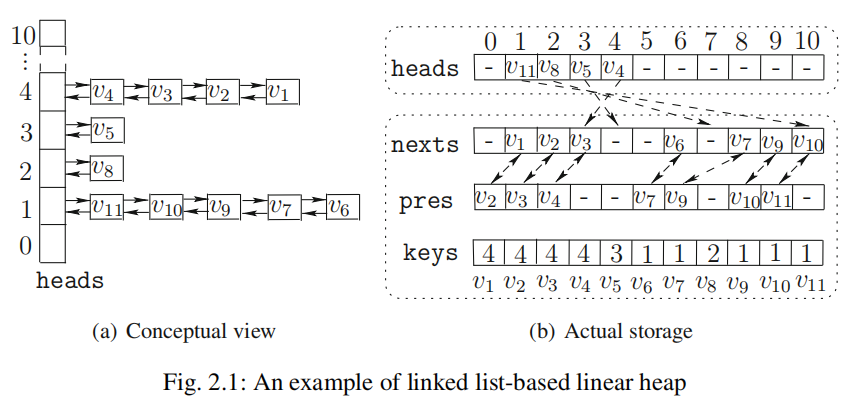
其基本结构很简单,主要是用了双向链表的结构
•heads:the heads of doubly linked lists
•pres and nexts: the information of doubly linked lists
•keys: the key values of all elements
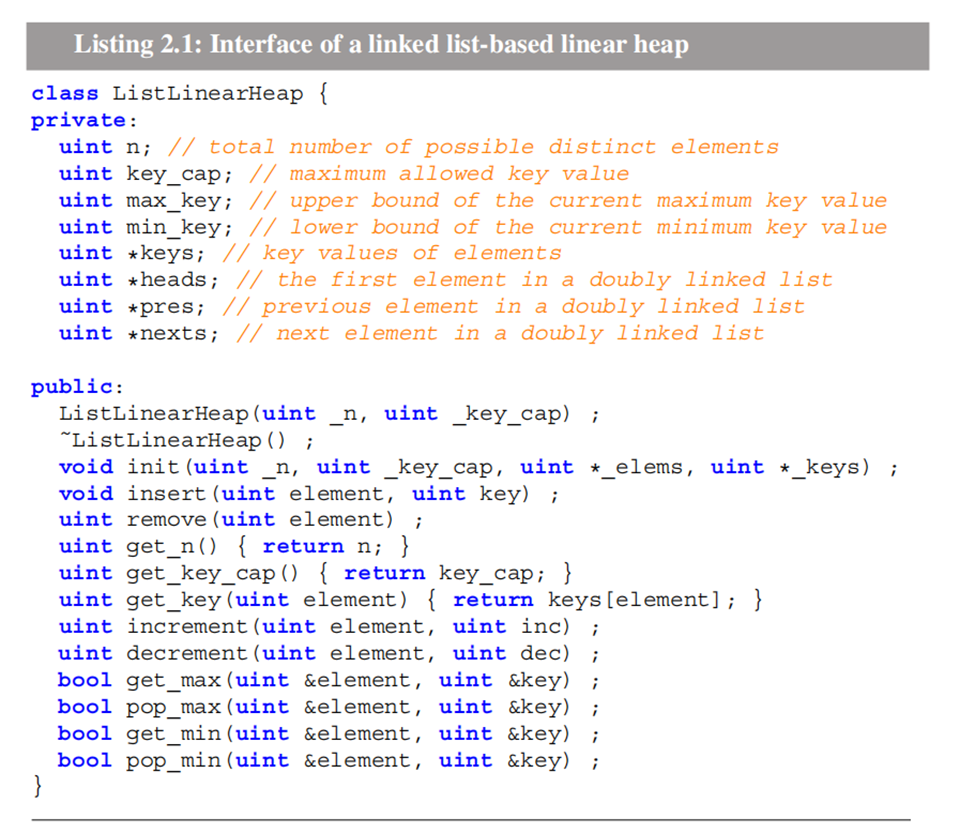
对应支持的操作如上所示
- Array-based Linear Heap
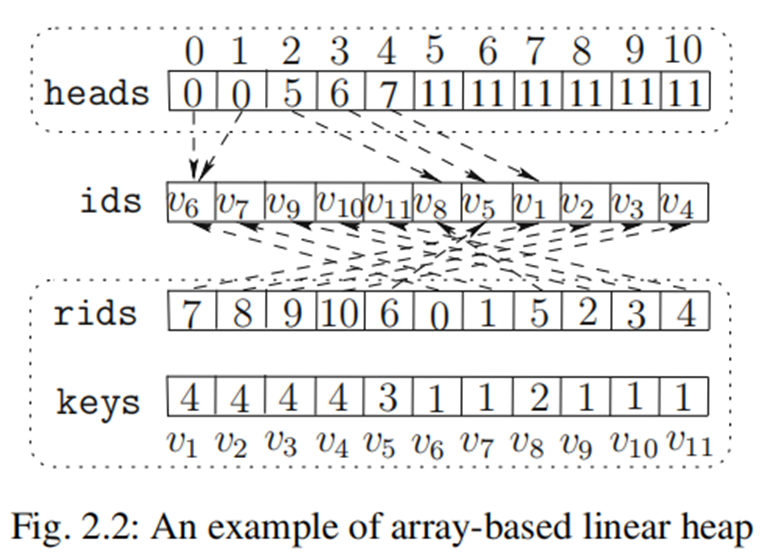
其转换成为数组的结构了,可以理解为按照key_value来排序的,有点像桶排序的感觉
•ids: all elements with the same key value are stored consecutively in an array ids
•heads: the start position of the elements for each distinct key value is stored in heads
•keys: the key values of all elements
•rids: the position of elements in ids are stored in an array rids (i.e., rids[ids[i]]=i).
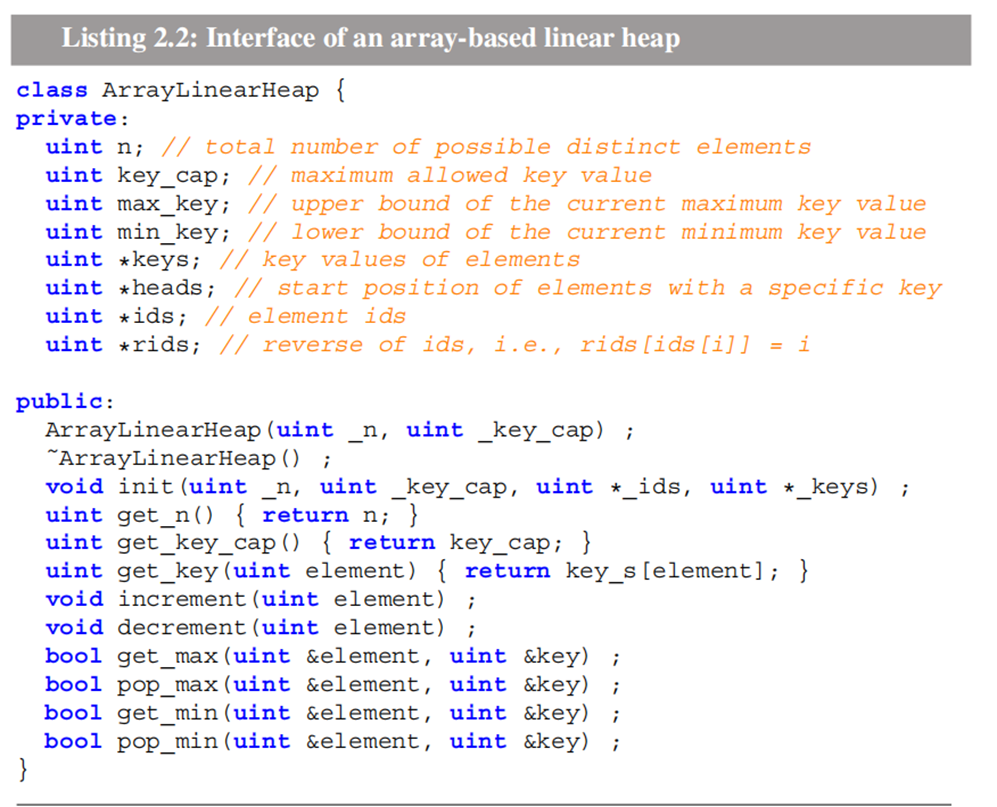
对应支持的操作如上
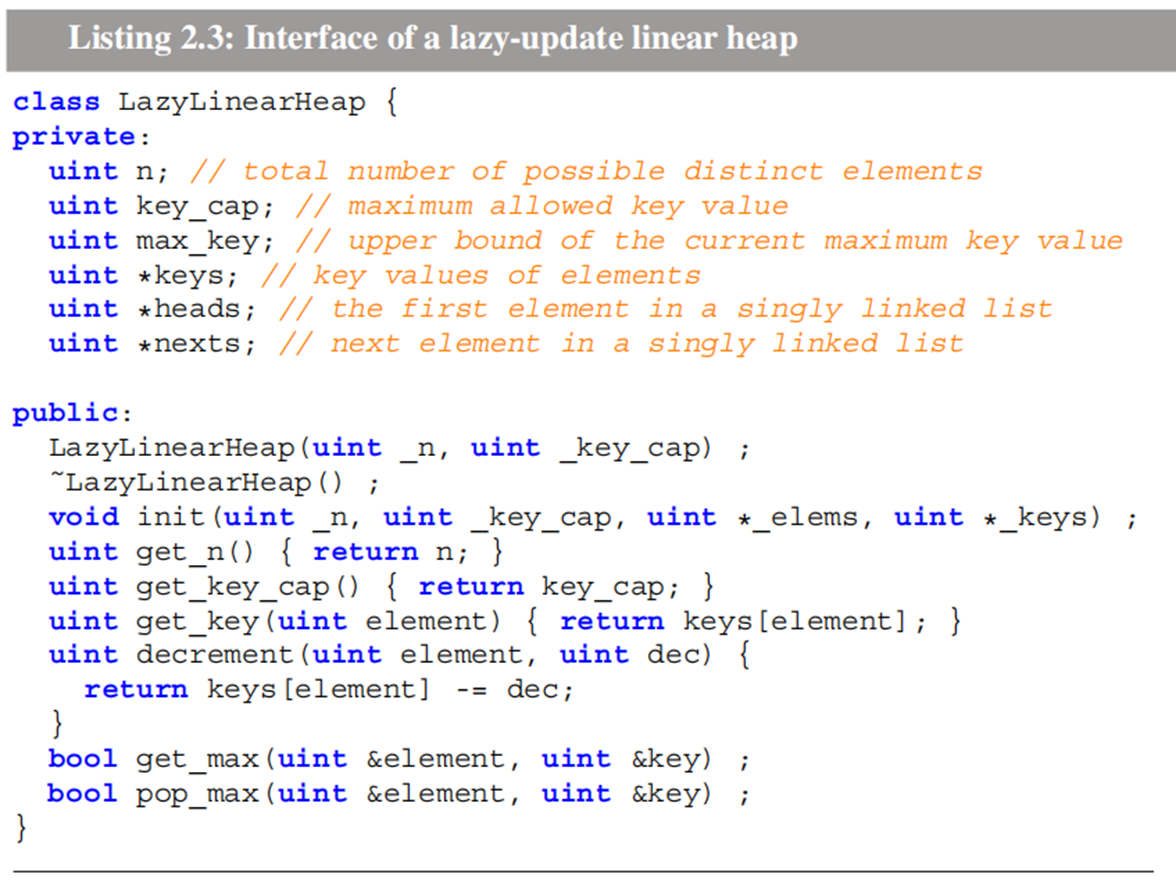
- LazyLinearHeap
相比较前面的链表结构,其主要是改成了单向的链表,且在维护元素更改时,会用懒标记
第三章
主要是围绕着k-core的相关内容
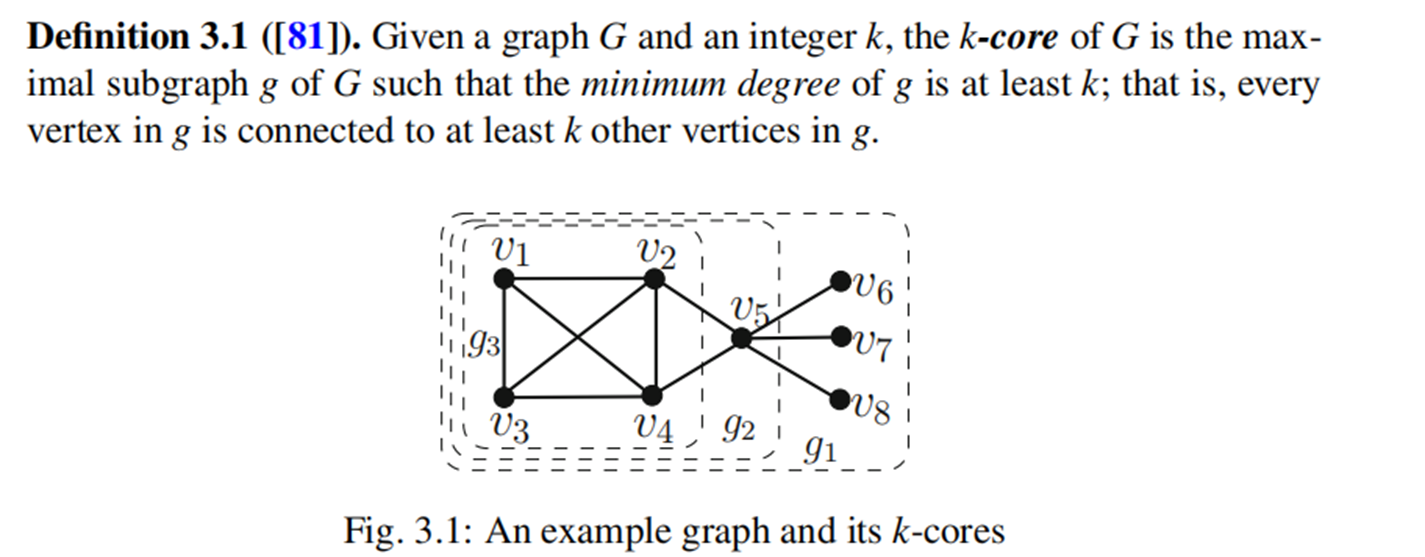
首先是k-core的定义部分:
定义部分包括:
1) k-core,如下图
2)顶点的core number,这也是通常k-core维护中维护的内容
3)degenerarcy $\delta(G)$:表示的是G中每个子图每个顶点的度最多为k
4) arboricity $\alpha(G)$: 表示的是G被分为最少的边不交的生成树的个数
k-core计算:
1)Peel 算法:本质是逐步剥离当前core值最小的顶点,对应会根据剥离顺序得到 degeneracy ordering
2)k-core计算:找到对应的子图
和peel算法类似,无非是将对应的子图进行了存储
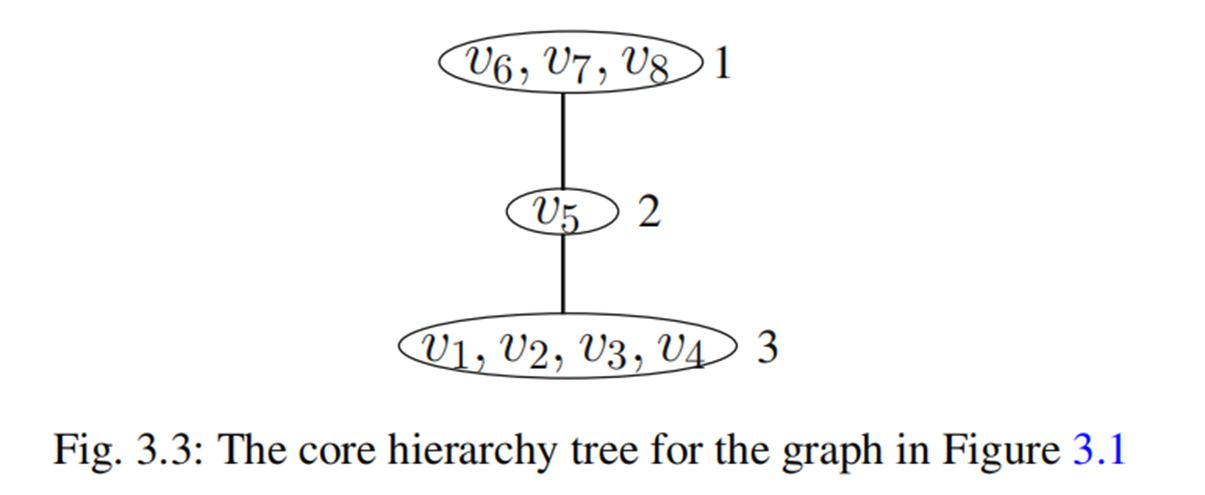
3)Core Hierarchy Tree:
定义时,增加了连通k-core的定义,这样使得层次树中含有连通性信息,建立时需要用到并查集的结构
当前针对于这个问题,已经存在了动态的维护方法,对应的分布式算法也有提出。
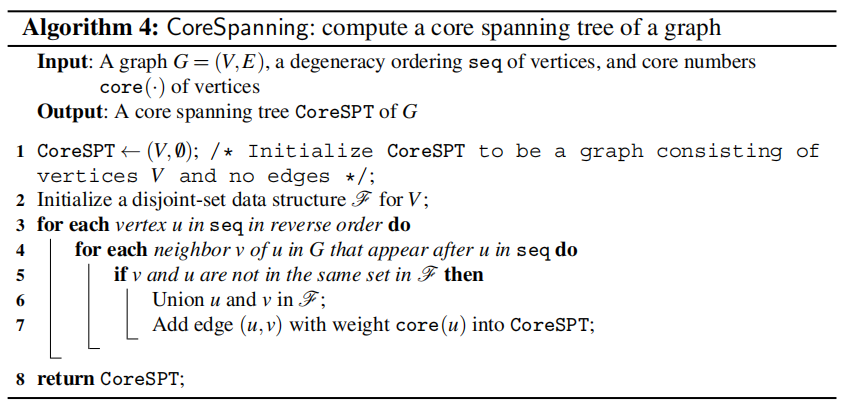
4)Core Spanning Tree:
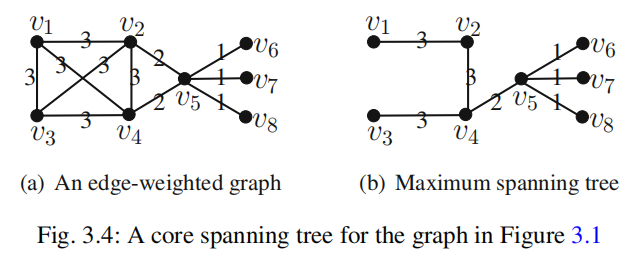
$G_w$生成方式是参考最大生成树来的,其中每一条连通边的权值$w(u,v)$被定义为 $min{core(u),core(v)}$
该问题意义:
①同时保留了k-core信息和对应的连通性信息,我们想提取最大的连通k-core时,只要保留最大的core值相连的边即可
②其可以用来做密度的近似,同样是用上面的办法,只保留最大的core,但是其中最后一个顶点需要重复加一遍前面的core值,然后最后将累计的权值除二再除以顶点数
其他情况下的k-core分解
1) An h-index-based Local Algorithm
定义了一个h-index ,然后基于这个定义来分解k-core
2)I/O- Efficient Core Decomposition
基于IO加速的分解,其实就是一边读写一边做操作,少了一些邻居信息
第四章 最密子图计算
定义部分:
$\rho(g)= \frac{|E(g)|}{|V(g)|}= \frac{d_{avg}(g)}{2}$
问题通常分为近似问题和精确问题
近似问题:
1)2-Approximation 算法
直接按照degenerarcy ordering 剥离即可
2) A straming $2(1+\epsilon)$- Approxiamtion 算法
利用当前度来计算,每次剥离 $d(v)<= 2*(1+\epsilon) * \rho(S)$ 的顶点
3) 精确算法:
密度测试——利用网络流+二分的算法,合理建图来判断密度区间
第五章 高层结构的核分解
3-clique(三角形分解):
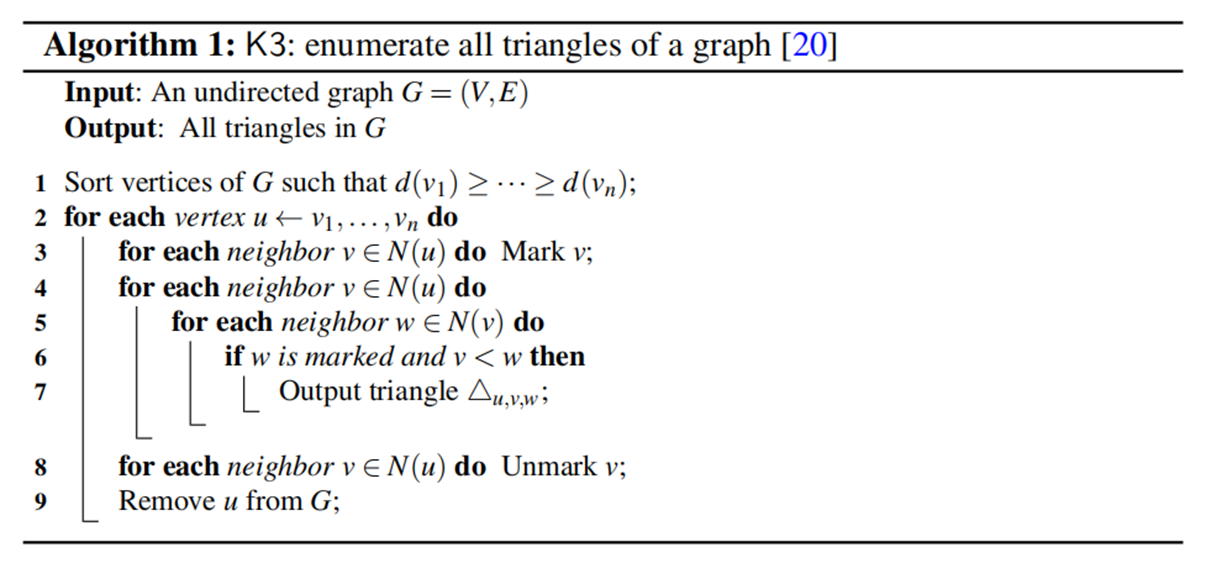
本质很像暴力枚举,就是枚举顶点v,然后枚举v的邻居w,再枚举w的邻居u来判断是否和v相连
TriE Algorithm:
和上面算法很像,区别就是换了枚举v的次序,并且将原图变成了有向图
k-clique 枚举算法:
本质和前面一样啊,就是dfs多了几轮
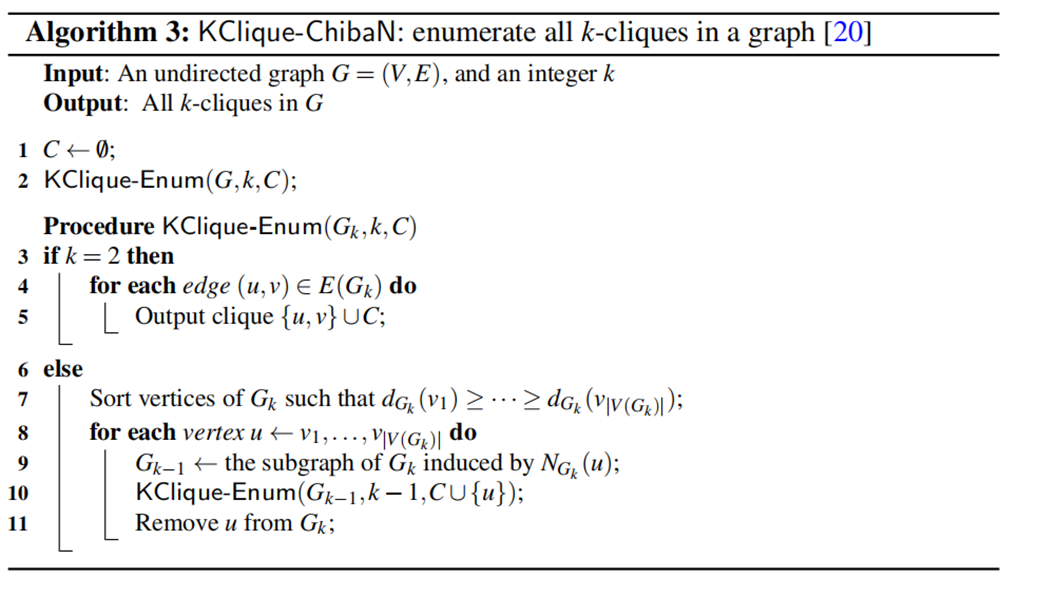
k-clique-oriented: 则是基于了TriE的一个改进
k-truss:
k-truss是基于边来定义的,其定义了每条边的supp支持度,也就是其参与构成三角形的个数
然后k-truss则是一个子图中每条边都能参与构成至少k-2个三角形
性质:
1)每个k-truss都是(k-1)truss的子图
2) 每个k-truss都是(k+1) core 的子图
对应有每个边的truss number 的定义:表明的是含有该边的最大的k-truss
计算方式:
PeelTruss:
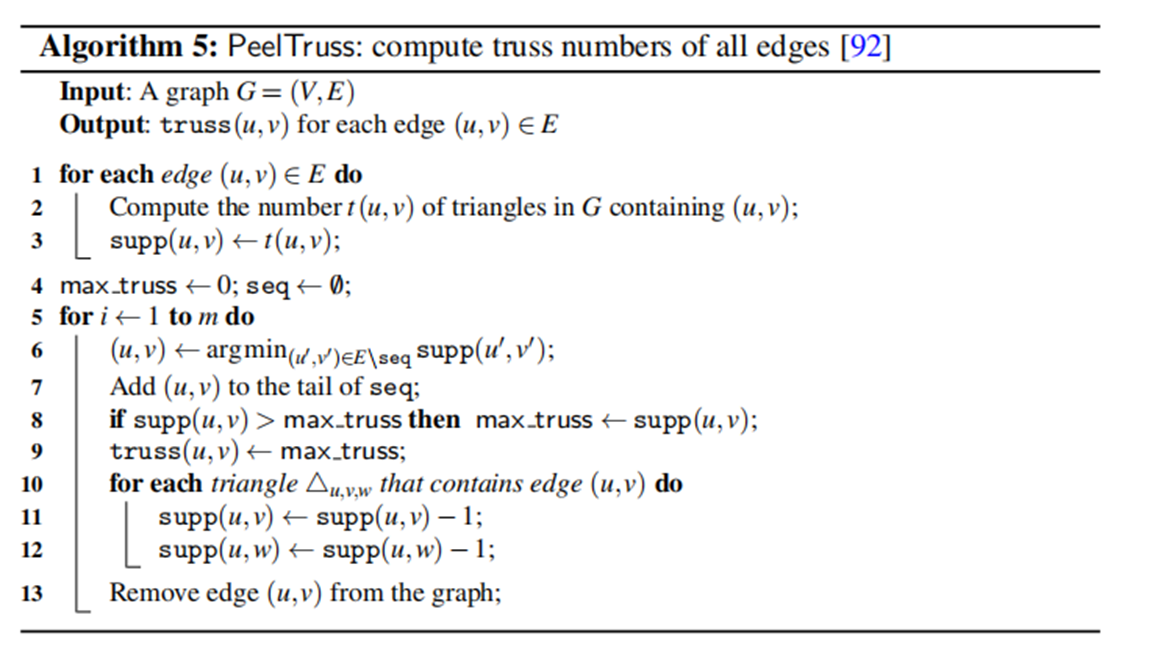
剥离过程中涉及到三角形的计算,肯定复杂度要大于peelcore
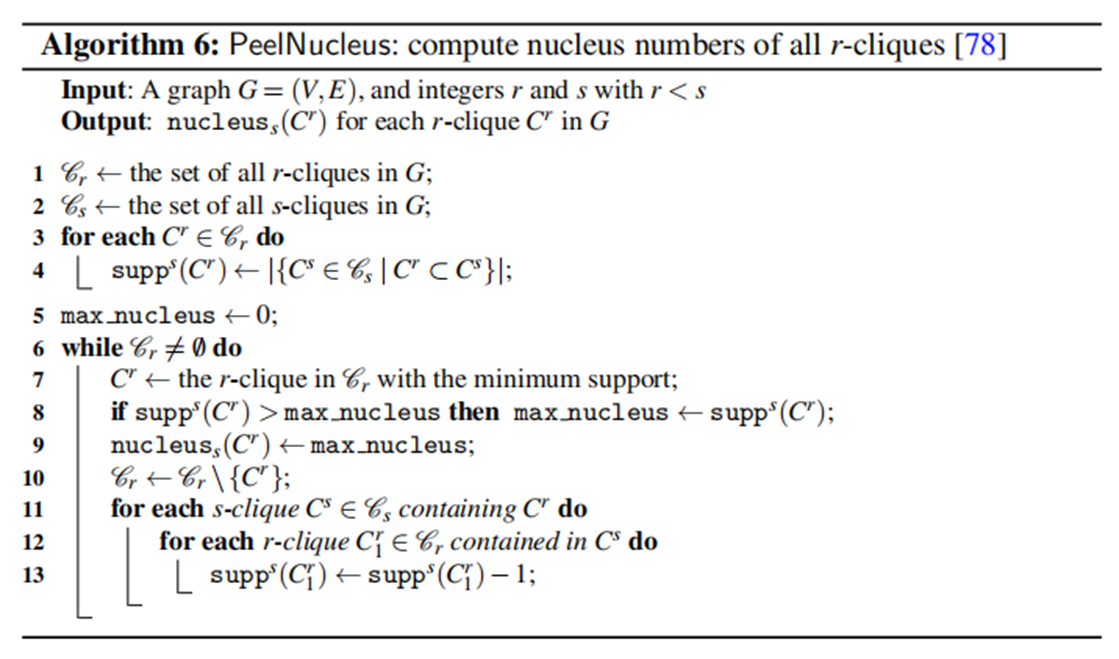
s-clique support: r-clique中含有s-clique的数量
对应的s-clique connected : 两个r-clique都被含在s-clique中包含对应的clique
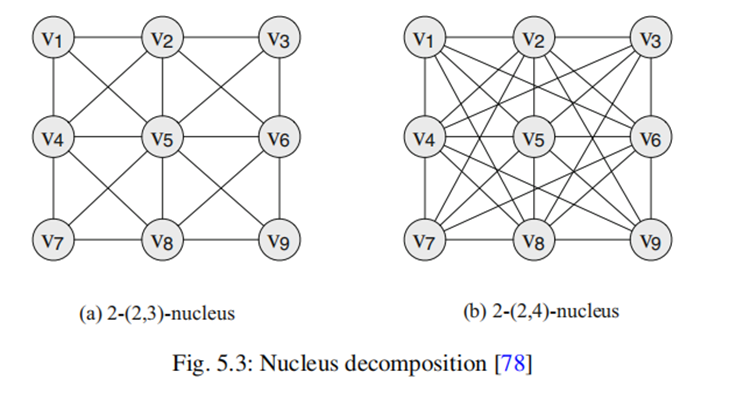
k-(r,s)-nucleaus 的定义:
1) 任意r-clique 其s-clique的support 一定大于等于k
2) 任意的两个r-clique在s-clique中一定是连通的
计算:也是用的peelNucleus
k-clique density
$\rho_k(g) = \frac{c_k(g)}{|V(g)|}, c_k(g)是g中k-cliques的数量$
其计算密度对应也是近似算法和精确算法
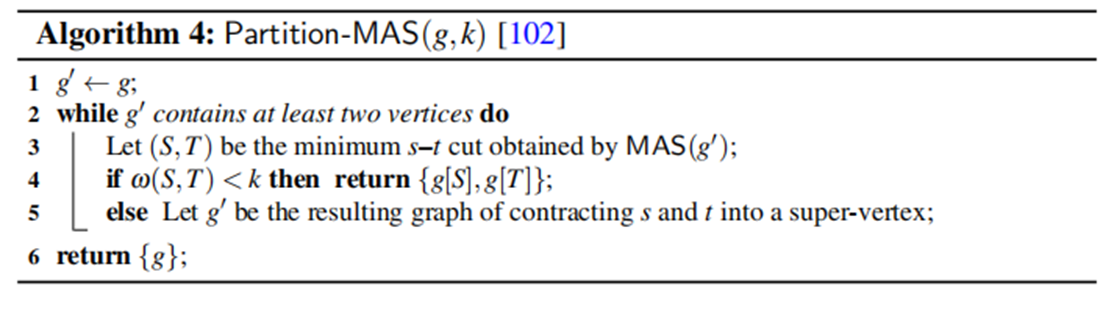
第六章 边连通性分解
K-ECC 删除任意k-1条边以后仍然连通
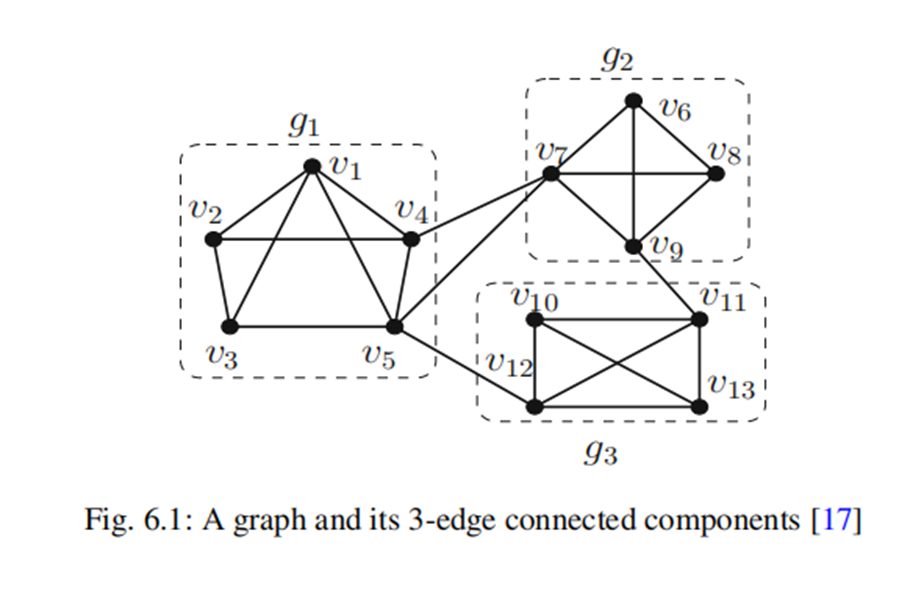
计算方式KECC:
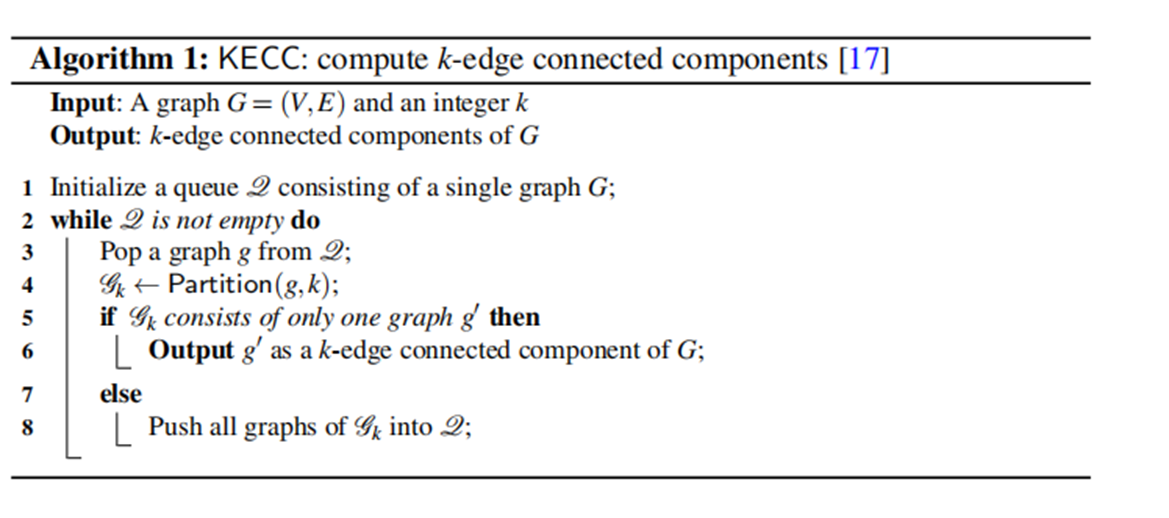
这里面重点为如何分割
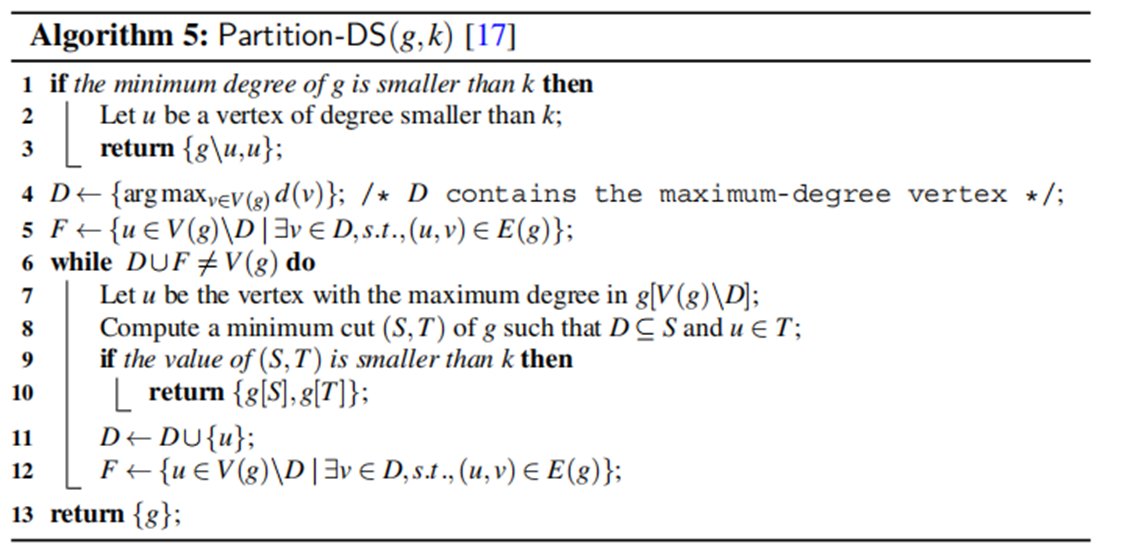
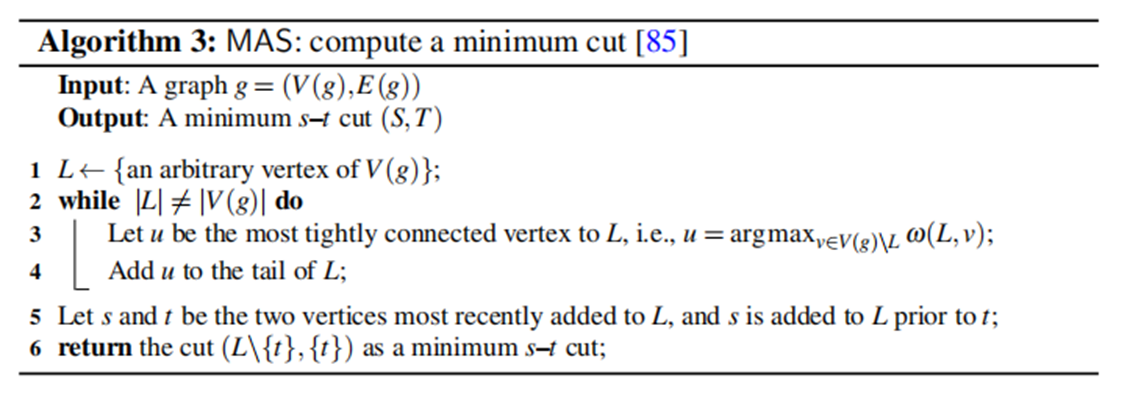
1) 两路分割:
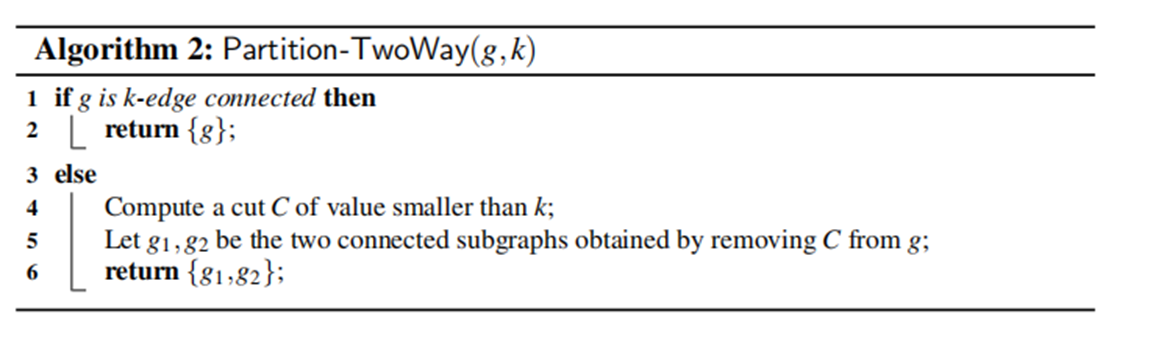
其中计算最小割是通过下面的构造
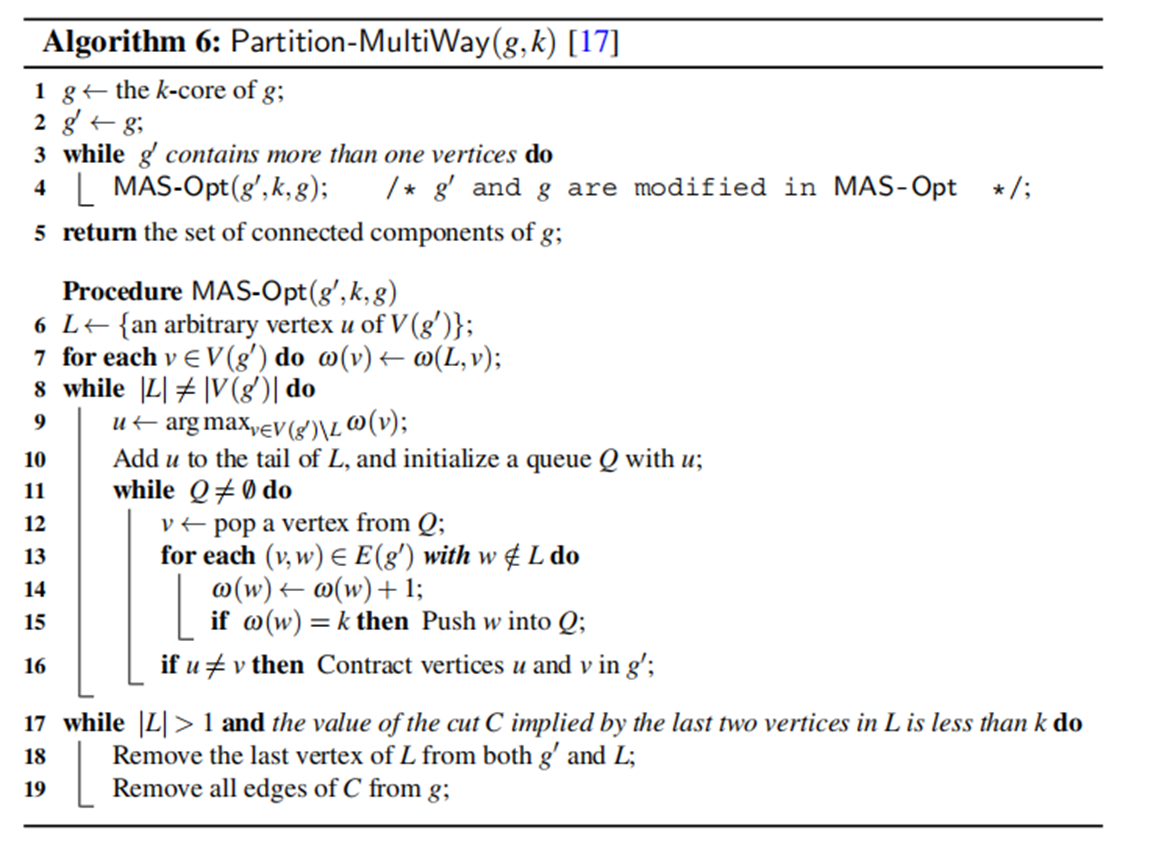
2) 多路分割